
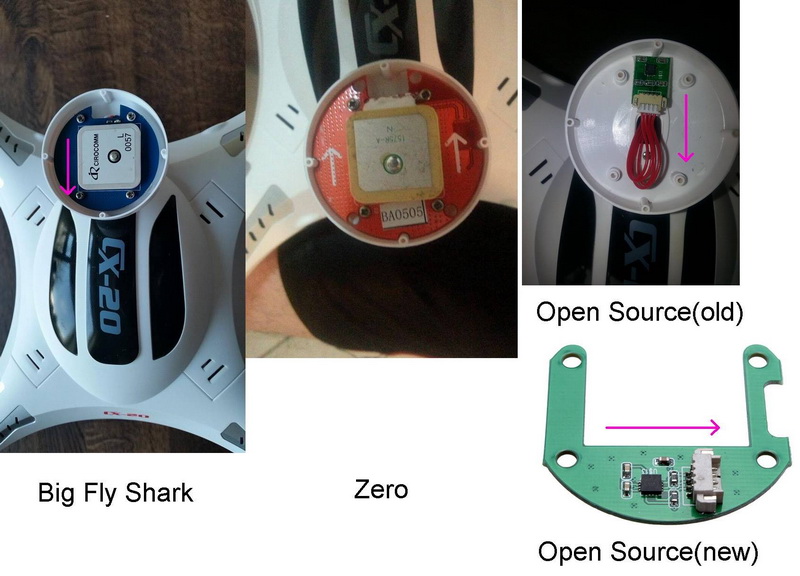
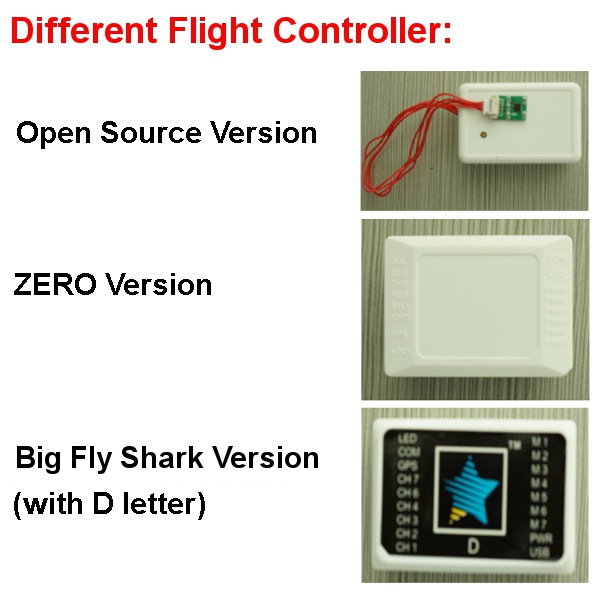
Mint említettem hogy a CX20 ból 3 féle létezik, Zero, Opensource, Bigflyshark.
Zero ról nem sokat lehet tudni csak azt hogy ugyanúgy MissionPlanner-el lehet beállítani, mint bármely más arducopter alapú vezérlőt. Rengetegen szidják sok a fura lezuhanás, irányítás elvesztés stb.

Opensouce verzió tisztán apm alapú, tudja a Misszió repülést, relatív sok a gond, nálam kettő is landolt javításra giroszkóp hibával. Mondhatni ez a legokosabb verzió de nagy a szórás.
BigflyShark legmegbízhatóbb, felhasználói felülete a legegyszerűbb, misszió repülést nem tud. Leírások alapján ez tűnt a legjobb választásnak. Ennél a verziónál az iránytű benne van az FC dobozában, a GPS-t meg alapból a tetejébe rakják.
Végül rendeltem egyet kb 80000Ft nál ált meg, egy 2700mah 3S aksival, érdekes módon 1 hét alatt meg is jött.
Meglepően igényes csomagolása van, adnak hozzá egy töltőt ami 4 óra alatt képes a 3S aksit feltölteni. Első próbálkozásnál gyakorlatilag repülni nem tudott össze vissza billeget, használhatatlan volt, GPS-t nem talált.

Letöltöttem az X6 asszisztens programot a gyártó honlapjáról, rögtön javasolta hogy a szoftvert frissítsem, 149 es verzióra. Ezek után GPS-t talált, de nem tudtam a gépet élesíteni, sárga led villogott gondoltam hátha mindig az iránytű kalibrációs módba esik, de nem.
Míg el nem olvastam mit ír a konfigurációs program, vagyis a távot újra kellet kalibrálni, ezt a set level feliratú gombbal lehet megtenni. Ezek után újra próba, már repült a gép GPS hold működött, de mindig volt egy fura beremegés, gondoltam szétkapom a masinát.
Szörnyülködtem ami van, az FC ferdén berakva lötyögősen, a forrasztások katasztrofálisak. A táp kábelek túl hosszúak, az ESC kábelek szintén. Minden kábelt kiforrasztottam méretre vágtam majd vissza forrasztottam, illetve az FC-t jobb minőségű két oldalas ragasztóval rögzítettem párhuzamosan, majd pótoltam a hiányzó kondenzátorokat, az ESCken levőket szilikon ragasztóval rögzítettem ne hogy letörjenek a rezgéstől.
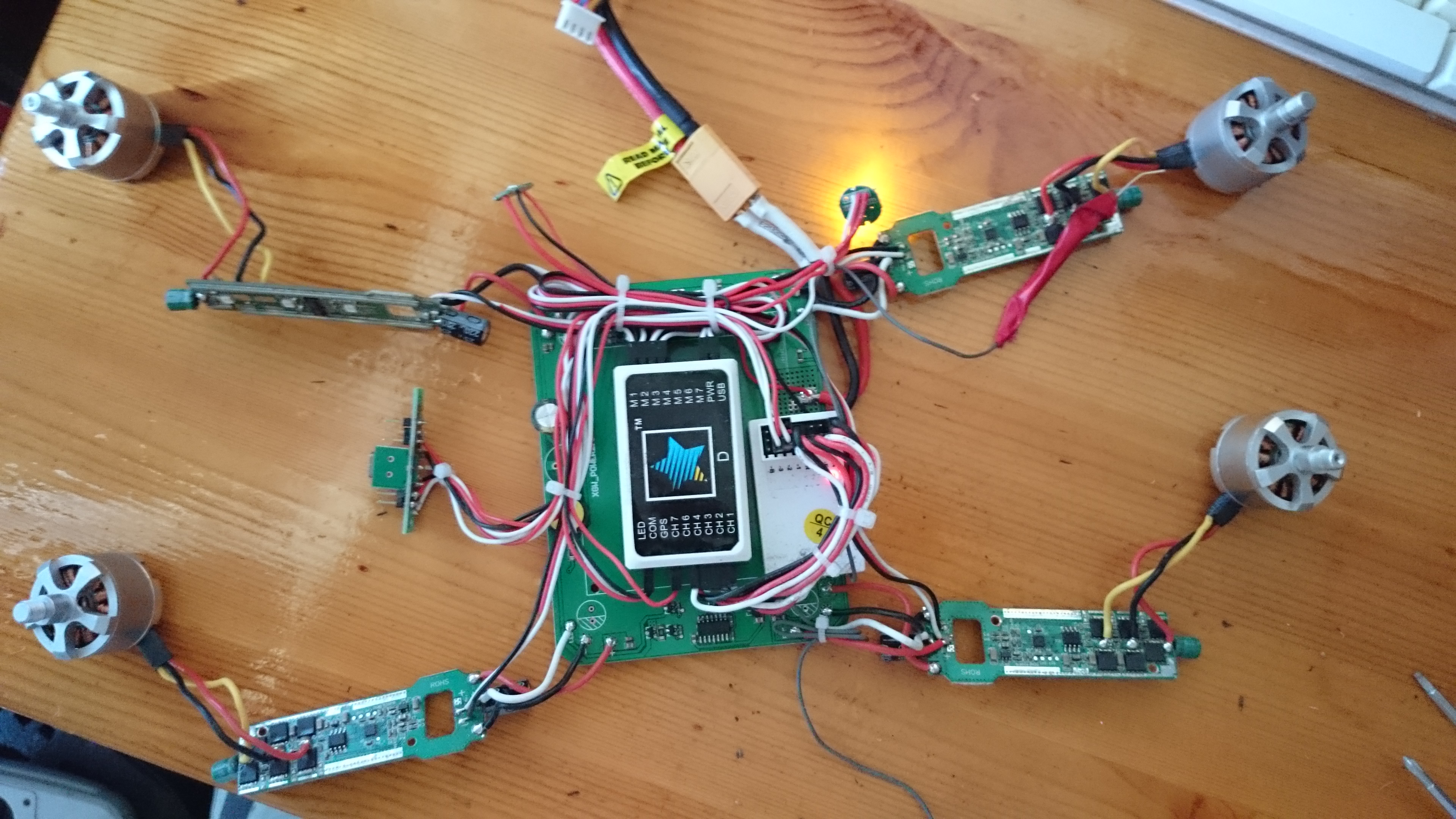
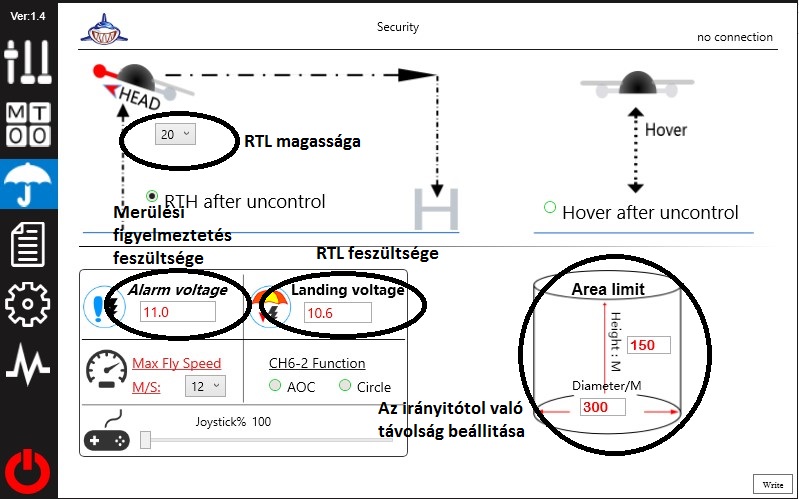
A hibák megszűntek gyönyörűen tartotta a pozíciót(Jobban mint egy Phantom2 es) kifejezetten stabil és fürgévé vált a gép. Majd a konfig ban beállítottam hogy 11 Voltnál jelezzen ha lemerült, és 10.6V kezdje meg az RTL-t úgy hogy belehessen avatkozni, illetve 20 méter magasra szálljon ne 5 méterre. Meg a YAW paraméter csökkentettem mert túl gyorsan fordult.
Sajnos táskát nem vásároltam így az első szállításnál a gps letört. Kénytelen voltam venni egy Phantom-hoz való háti táskát ami inkább egy bőröndre hasonlít. A gyári propellereket egyből DJI féle önzáró propellerekre cseréltem.


Olyan hiba is volt hogy a rendszeresen failsafe be kapcsolt, ezt a problémát a táv kontakt hibás kapcsolója produkálta, amikor megmozdítottam a távot megszakadt a kapcsolat. Igen egyszerűen oldottam meg betettem egy 6 voltos Ubec-et(6 volt step down konverter a modellezésben BEC nek hívják) és kivezetettem egy xt60 as csatlakozót. A hiba megszűnt.
Ami eddigi tapasztalat:

Repülés idő üresen 10 perc
Repülés idő gimbalal 240gramm plusz súly 7 perc.
Távolság kb 300 méter, ezután aktiválódott a failsafe és vissza tér.
Javaslom első repülés előtt, szed szét és nézd át.
Táv kalibrálása:




